
无人机飞控系统组成及工作原理
发布时间:2024-07-19 23:02:59 来源:火狐体育真人入口最核心的技术集中在总体技术、动力系统和飞控技术三个方面,共同决定了无人机系统的飞行高度、航程、航时、航速、载重等等一些重要的技术指标。在无人机中,飞控系统的作用是控制无人机运行的姿态和高度,决定着无人机飞行时的航迹和路线,它是无人机完成各种任务的关键。一套完整的无人机飞行
飞行控制系统简称飞控系统,是控制无人机飞行姿态和运动方向的部件,是无人机完成起飞、空中飞行、执行任务、返场回收等整个飞行过程的核心系统,也称为自动驾驶仪,这也是无人机区别于航模的根本原因之一。实际上,无人机的飞控系统就相当于有人机的驾驶员,是无人机执行任务的关键。
作为无人机飞行运动控制的核心,它要完成飞行器姿态和位置两大类输入参数与输出参数之间的转换,同时还要满足各种外界干扰条件下对操纵指令响应速度以及飞机操纵稳定性等要求的系统集成。
目前常用有惯性导航系统、气压导航系统和激光陀螺仪。为了提高飞机的操纵稳定性,通常采用陀螺和加速度计共同组成复合陀螺结构,保证了飞机姿态跟踪能力及在各种复杂姿态下飞机均能平稳地沿给定轨迹飞行。
3、高度计 高度计主要用于探测和计算无人机所处空中的高精度位置信息,通常采用三轴数字陀螺仪加三轴数字组合方式进行设计。
飞控系统是一个相当复杂的非线性系统,其中涉及到大量对飞机控制算法优化和提高精度性能有重要影响的变量参数,如姿态角、速度等;还要考虑到外界环境扰动及各种干扰条件下对数据处理过程所产生负面影响。
无人机要实现精确悬停、定高返航是飞行控制系统功能之一,而这些功能实现都需要基于实时控制器算法软件。实时控制器可分为惯性实时控制器和视觉实时控制器两种,其中视觉RTK一般用于无人机导航任务;惯性实时控制器可应用于固定翼飞机、直升机等。
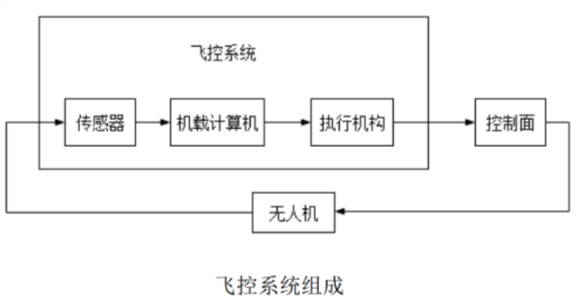
1、控制 解决“怎么飞”的问题。根据任务,通过算法计算出控制量,输出给电调,进而控制电机转速,进而实现姿态控制,这是飞控系统要做的首要事情。 2、定位 解决“在哪儿”的问题。充分发挥飞控系统中各种传感器的功能,综合分析判断得到准确的位置和姿态信息。 3、导航 解决“去哪儿”的问题。飞行操控人员或者地面站操控无人机进行飞行,进而实现航迹控制。

无人机飞控系统常用的传感器包括陀螺仪、加速度计、磁力计、气压计、超声波传感器及GPS模块等,这些传感器构成无人机飞控系统设计的基础。各传感器基本功能如下: 1、惯性测量单元(IMU),包括加速度计、陀螺仪和磁力计,主要得到无人机的姿态信息。常用的有6轴、9轴和10轴三种,6轴IMU包含三轴加速度计和三轴陀螺仪,9轴IMU是包含了三轴加速度计、三轴陀螺仪和三轴磁力计,而10轴IMU则是在9轴IMU基础上加上气压计构成。陀螺仪主要用于记录俯仰、横滚角度;加速度计主要记录加速度,是测量运载体线加速度的仪表;气压计主要用于记录海拔高度。
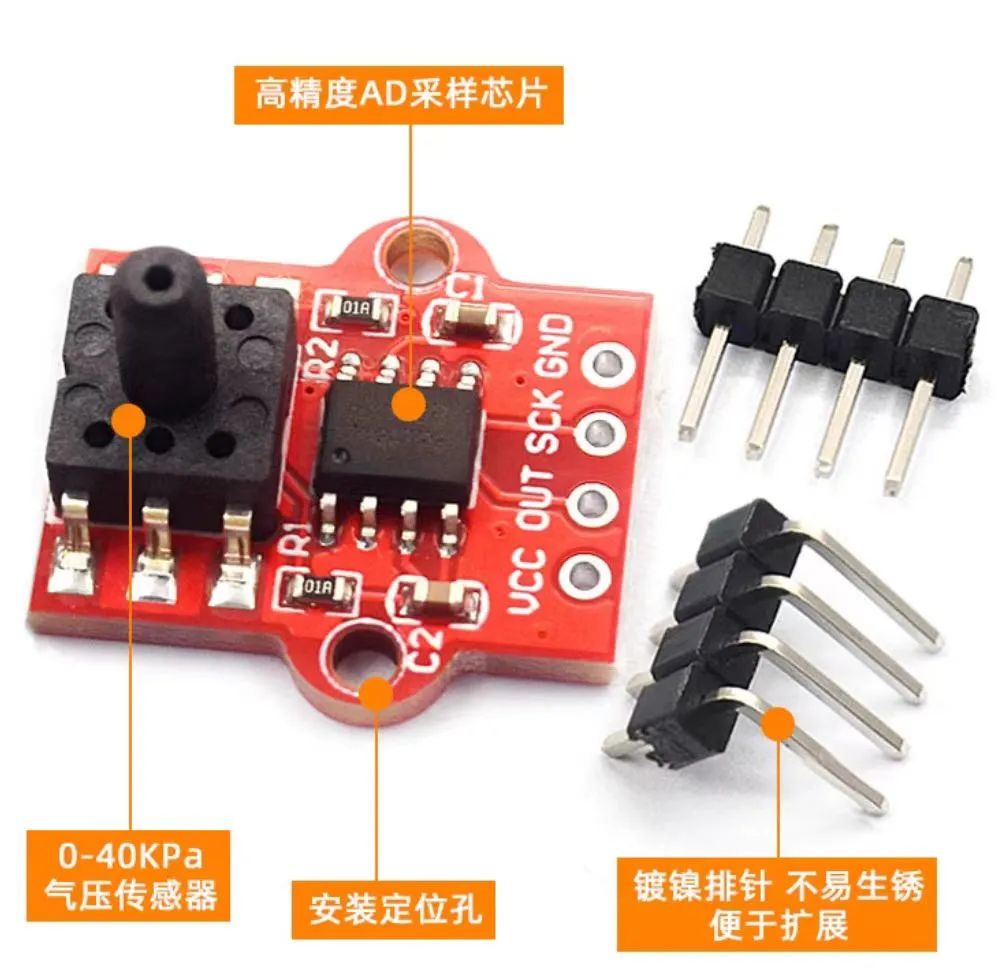
惯性测量单元(IMU) 2、高度测量单元,包括气压传感器(简称气压计)和超声传感器。气压计测量得到绝对高度信息,而超声传感器测量得到相对高度信息,可实现悬停高度控制或避障。

超声传感器 3、全球定位系统(GPS),包含GPS模块和指南针模块,用于精确确定飞行器的方向及经纬度。GPS主要是接收GPS卫星导航位置信息,用于无人机的定位。对于失控保护自动返航,精准定位悬停等功能的实现至关重要。
3、机载计算机 机载计算机是飞控系统的核心部件,是算法计算平台,由硬件和软件组成。 1、硬件,也就是电路板,由主处理控制器(常用的有通用型处理器MPU、数字信号处理器DSP及可编程门阵列FPGA)、二次电源(5V、±15V等直流电源)、模拟量输入/输出接口、离散量接口、通信接口RS232RS422RS485、ARINC429和1553B总线)、余度管理(信息交换电路、同步指示电路、通道故障逻辑综合电路及故障切换电路)、加温电路、检测接口等组成。
机载计算机 2、软件,也就是飞控程序,是一种运行于计算机上的嵌入式实时任务软件,不仅要求功能正确、性能好、效率高,而且要求其具有较好的质量保证、可靠性和可维护性。主要模块有硬件接口驱动模块、传感器数据处理模块、飞行控制律模块、导航与制导律模块、飞行任务管理模块、任务设备管理模块、余度管理模块、数据传输和记录模块、自检测模块等。
APM、PIXHAWK飞控,地面站为Mission Planner,飞控、地面站均开源。 NAZA飞控,无地面站,不开源。 N3飞控,无地面站,不开源。 A2飞控,配有大疆地面站,不开源。 A3飞控,配有大疆地面站,不开源。 LINGQUE灵鹊系列飞行控制系统,有地面站,不开源。
N3飞控依然采用了NAZA系列的IMU与主控一体的结构,主控上提供了丰富的扩展接口,几乎能与DJI目前所有主流的配件配合使用,对LB2、禅思云台、如影MX云台、DJI GO的支持一样不少。N3飞控本身就内置双IMU实现双冗余,在一套IMU传感器异常时可自动切换到备用IMU,可靠性大大增加。同时通过主控上的EXP接口可外接A3升级套件,可组成三IMU、双GPS的冗余系统,可靠性进一步增加,让N3也能轻松满足专业级应用。GNSS-Compass模块,内含GPS/GLONASS双模接收机和指南针。相比以前增加了CAN扩展接口,并增加了一个很小的LED状态指示灯,模块的工作状态一目了然。总体来说,N3不再像以前的NAZA系列给人一种低端的感觉,从工业设计、制造工艺、硬件配置和可拓展性各方面都飞跃了一个很大的台阶。
N3飞控依然与NAZA系列的产品一样采用了主控与IMU一体的结构。以前的NAZA系列,主控的安装方向必须与机头方向一致,这对飞控的安装和走线的主控可以向前、向左、向右、向后进行安装,这一变化很值得赞赏,对安装和走线带来了很大的方便。 N3飞控在S800机架的大震动下,航线飞行完全没有掉高的现象,看来N3的内部减震的确做得很好,同样的使用情况WKM和A2都会出现不同程度的掉高。N3飞控在GPS模式下,最大倾角设置为35°,以稳定性和精准的操控为主,定点、定高都很给力,不论是慢速精确飞行、还是大机动航线飞行都提供了很满意的稳定性和操控手感。与NAZA V2相比,提升了不只是一点点。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

企业纷纷展开了全方位的角逐,各种层出不穷的新技术也相继登场。市场上的竞争说白了还是技术上的积累与比拼,那么,问题来了,今年
控,但这已经不能满足我的需求,看了单片机之后突发奇想,能不能用单片机做个
不仅在军事中作用巨大,还在航拍、农业、植保、微型、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道
经过丈量电流(双向),理想的情况下供给电气阻隔,以削减电能损耗和消除电击损坏用户体系的时机。一起
”很可能影响到正常的军民航飞行,不仅妨碍空防、空管秩序,也可能造成更严重后果。
轻便的属性在救灾领域也发挥更大作用,美国的 IntelliNet 公司开发了 Lynx6-A
事件频频发生,小到可以用来偷窥,大到可以用来窃取国家秘密、军事秘密,小到掉下来可以砸伤一个人,大到造成机场关闭,飞机延时,乘客滞留,造成严重的后果。所以国家法律也不断完善
失控状态;本产品经过多次实际距离测试500-1200米秒速反制;实现远距离切断
反制设备可以在各种环境下,利用各种干扰装置,有针对性的对 GPS,远程控制,图像等进行针对性的干扰,从而与
在快递服务、仓储服务领域不断有新的进展,除科技公司、物流企业之外,亦不乏零售商家的身影。美国联邦航空管理局8月底推出了商用
一般采用成本较低的多旋翼平台,用于航拍、游戏等休闲用途。 图:世界民用
包括4块: (1)远程服务器端(2)飞机端(3)地面中继端(4)手机视频控制端
的探测存在哪些难点呢?电磁干扰会降低射频传感器探测能力。在城市环境中,有
”惹事,已不是第一次。不过此类事件有望大幅减少。记者昨日获悉,位于郫县菁蓉小镇的西南
程度产生了一次“完美风暴”,电子技术的进步以及大批量普及驱动成本降低,在过去几年中见证了
的流行和快速增长。廉价、轻便的基于微控制器的飞行控制器、加速度计和陀螺仪等传感器、全球定位
应用领域:城市管理、农业、地质、气象、电力、电力检查、抢险救灾、摄像等行业。我们能用
的应用在很多年前就出现在我们的生活当中,农药喷洒、电力巡航,警用侦查等等都有
一般直升机那样可变。通过改变不同旋翼相对转速可以改变单轴推进力的大小,从而控制飞行器的运行轨迹.图2 多轴飞行器图3 各类变模态平台二.
技术成果交易展览会在深圳完美落幕。素有高新技术领域的“行业风向标”、“技术风向标”和“创新风向标”之称的高交会,点燃了
”(UAV)是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
我已经按照 NXP 在线 hovergame 说明组装了 hovergame
。一切看起来都正确,我可以看到 QGroundControl、FMU 和 RC 单元之间的通信。但是,
兽社区共同协办。大亚商贸、亚拓、天途、致导、北航航模社、海康威视、极客营、海创富平、艾奥金(IOKING)、酷玩实验室等数十家
初始化完成。这两个指示灯的状态指示,如下表所示。LED 指示灯指示状态此时如果遥控手柄的右上角有信号而不是一个“X”,同时手柄上的“连接
控的升级版)进行交流。对于本项目,我想利用LabVIEW完成一些简单的视觉任务,如避障,定点降落等,另外可以通过
机沿指定航线安全,准时,准确的飞行。 获得必要的导航要素:高度,速度,姿态,航向 给出
的小型 PCB,它使用 ESP32 和 MPU-6050 进行轴控制。电机控制是通过 PWM 完成的。我们仍在忙于对其进行编程,并将在代码
的外壳周期性高频振动,将表面即将结冰的低温液滴和残余薄冰甩掉。这种振动除冰
控板,围绕接口介绍以及使用教程展开介绍,希望大家喜欢,废线F407的四旋翼
学习对嵌入式的理解更加深入,因此想要重新梳理一下小四轴,之后在此基础上实现大四轴的
培训学校啊4大优势:1、包学包会、学会为止2、免费复训3、尊享优惠,创业支持4、百分之百取证就业,多旋翼就业,直升机就业,固定翼就业。可从事
米(flymi),这家公司的第一款产品将与小米分成,之后的产品由公司独立开发销售,小米只享受股份待遇。在此之后的很长一段时间内,小米
主要作用于 2.4 千兆赫和 5.8 千兆赫干扰频带,以及 GNSS 全球卫星定位
为三频段发射机天线一体化设计,可以同时产2.4GHz/5.8GHz频段
7月19日,武汉公安机关人民警察实战训练基地,2018“汉警之翼”警用
可以分为两类:一、水上,即可在水面上航行或者起降。二、水下,即可以进入水中,在水面以下操作。
手培训、aopa取证、包学会、免费复训***1.库存管理借助于三维地图和激光雷达技术,
可以在煤矿和石场等自然资源区域上空飞行,从而计算出剩余储备并管理库存。项目经理可以
发展的因素就是以上的这三个方面,其中最关键的还是政策方面的制约因素,所以

 京公网安备 京ICP备05031284号-1
京公网安备 京ICP备05031284号-1